Dobot Magician 좌표 체계 및 동작 모드
좌표 체계
Dobot의 좌표체계는 Joint와 직교 좌표체계 2개를 제공한다. 첫째는 Joint 좌표계이다. 아래 그림에서 보는 것처럼 4개 관절 축(J1-J4)의 반시계 방향 회전 값을 가진다.

둘째, 직교 좌표계이다. 아래 그림에서 보는 바와 같이 3개의 모터의 중심이 원점이고 End-Effector의 위치가 x, y, z 위치이다.
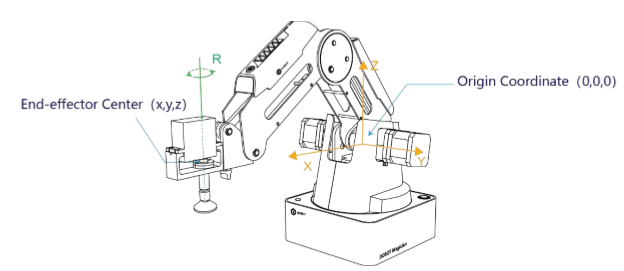
두 좌표 체계 모두 End-effector에 서보가 붙었을 때 반 시계 방향 회전(단위 도) 값을 추가 좌표값(R)으로 가진다.
모션 모드
PTP(Point To Point) 모드에서 움직일 때 MOVJ와 MOVL 두 가지 모션 모드를 사용할 수 있다. 이는 Teaching 시 사용한다.
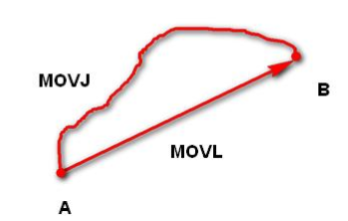
MOVJ Joint movement -두 점을 이동할때 각 각 모터가 독립적으로 목표 회전량만큼 회전한다. 이동 속도는 빠르나 궤적이 불규칙하다.
MOVL Rectilinear movement - 두 점을 직선으로 연결한 선을 따라 이동한다.
로봇 패스를 예측해야 할 필요가 있을 때 Motion Mode는 MOVL로 사용한다. 예로 로봇을 이용한 조립을 위해서 다른 부품과의 충돌을 방지하기 위하여 MOVL을 이용한 로봇 패스가 필요하다. 예로 아래 글의 동영상을 확인하면 블록을 집어 올릴 때 옆에 있는 블록을 밀치는 것을 확인할 수 있다. 이는 MOVJ로 모션 모드가 적용되어 패스가 불규칙하기 때문이다.
[Dobot, 2019] Dobot, "Dobot Magician User Guide", V1.7.0, Shenzhen Yuejiang Technology Co., Ltd, Jan 9, 2019.